深入原理学习汽车驾驶
本文从理论出发,深度剖析驾驶原理,从而从容面对各种复杂工况。
说明
本文章采用的汽车数据为(单位 mm):
| 车长 | 车宽 | 轴距 | 前轮距 | 后轮距 | 轮胎 |
|---|---|---|---|---|---|
| 4650 | 1860 | 2712 | 1565 | 1565 | 225/60 R18 |
车库尺寸为:5.8m x 3m
汽车转弯
转弯半径
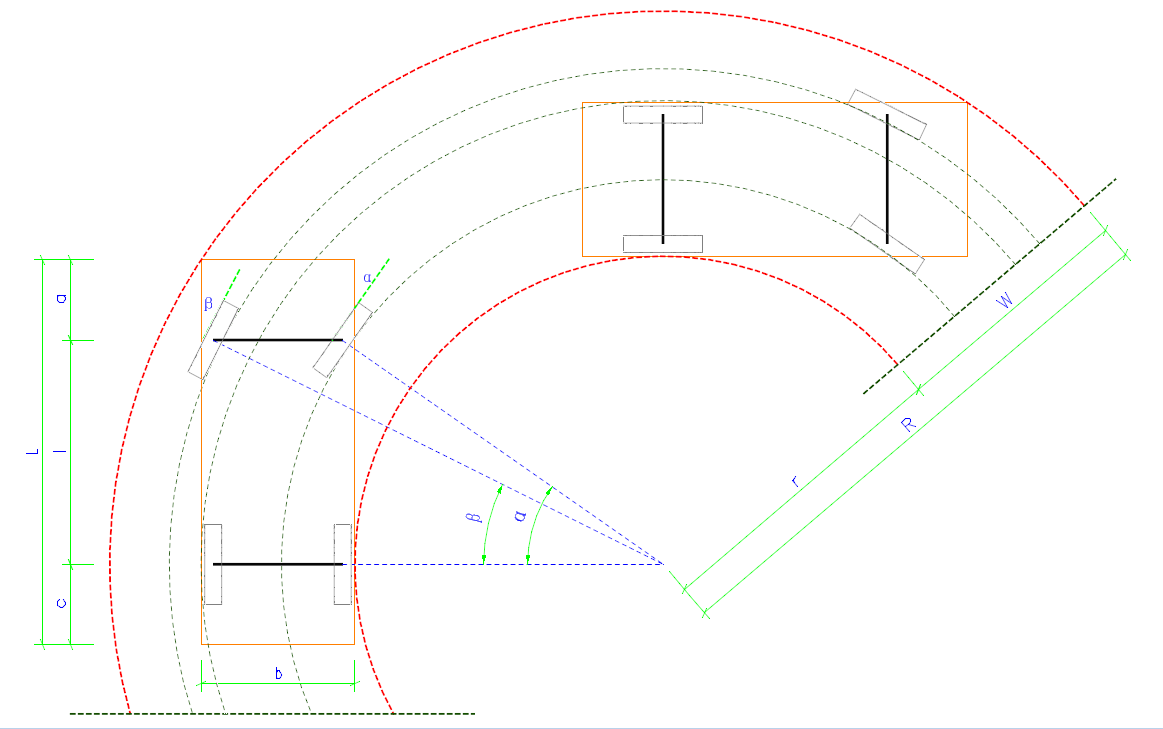
汽车转弯时如上图所示,其中:
- L:车总长
- a:前轴至车头距离
- l:轴距
- c:后轴至车尾距离
- b:车身宽度
- R:汽车转弯时最小外半径
- r:汽车转弯时最小内半径
- W:转弯时所需道路宽度
- \(\alpha\):汽车前内轮转角
- \(\beta\):汽车前外轮转角
\(\alpha\) 与 \(\beta\) 的关系
在转弯时,前面两个轮子的转弯角度是不一样的,因为汽车在行驶过程中(直线和转弯时候),每个车轮的运动轨迹必须符合他的自然运动轨迹,从而保证轮胎与地面始终处于纯滚动状态。
他们之间的关系为:
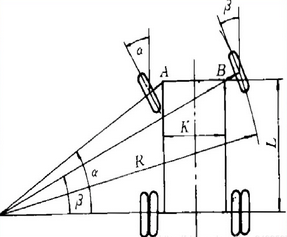 \[
cot\alpha - cot\beta = K/L
\]
\[
cot\alpha - cot\beta = K/L
\]
- \(\beta\) - 汽车前外轮转角
- \(\alpha\) - 汽车前内轮转角
- K - 两主销中心距
- L - 轴距(上图中)
具体的原理可以参考阿克曼几何。
最小内侧半径 r
最小内侧半径为右后轮外侧处的半径,其公式如下: \[ \begin{aligned} tan \alpha = l/r \\ r= l/tan\alpha=l \cdot ctan \alpha \end{aligned} \]
最大外侧半径 R
最大外侧半径为左车头的半径,根据勾股定理有: \[ \begin{aligned} R^2 &=(l+a)^2+(b+r)^2 \\ R^2 &=(l+a)^2+(b+b.ctan\alpha)^2 \\ 所以:R &= \sqrt{(l+a)^2+(b+b.ctan\alpha)^2} \end{aligned} \] ### 转弯道路宽度
\[ \begin{aligned} W = R -r \end{aligned} \]
内轮差
在汽车行驶过程中,前内轮能过去的地方,后轮不一定能通过,所以需要使用内轮差来进行判断。即当障碍物垂直于内轮的距离大于内轮差时,后轮肯定也可以通过。
内轮差的计算公式如下: \[ d_{内轮差} = r/cos \alpha - r \]
汽车转弯时最大速度
由物理学公式: \[ \begin{aligned} F_{离心力} &=m\times a\\ a &=\omega ^2 \cdot r = v^2/r \\ \end{aligned} \]
- F-离心力
- m-汽车质量
- \(\omega\)-角速度
- \(v\)-速度
- r-半径
\[ \begin{aligned} \therefore v= \sqrt{F_{离心力} \cdot r/{m}} \end{aligned} \]
汽车在转弯过程中,通过汽车与地面的摩擦力来克服汽车的离心力,所以有: \[ \begin{aligned} \because F_{摩擦} &= \mu \cdot m \cdot g \\ \therefore v &= \sqrt{\mu \cdot g \cdot r} \end{aligned} \]
- \(\mu\) - 汽车与需的摩擦系数,不同类型的路面其值不同
- g- 重力加速度,可取 \(9.8 \ m/s^2\)
常用数值表
根据上述公式,计算了一些常用转向角对应的值,方便取用(单位:m)。
| 内轮角 \(\theta\) (单位:度) | r \((l \cdot ctan \alpha)\) | \(d_{内轮差} \ (r/cos \alpha - r)\) | l = 2.712 |
|---|---|---|---|
| 5 | 11.4 l | 0.04 l | r=31.0, d=0.1 |
| 10 | 5.7 l | 0.09 l | r=15.4, d=0.2 |
| 15 | 3.7 l | 0.13 l | r=10.1, d=0.4 |
| 20 | 2.7 l | 0.18 l | r=7.5, d=0.5 |
| 25 | 2.1 l | 0.22 l | r=5.8, d=0.6 |
| 30 | 1.7 l | 0.27 l | r=4.7, d=0.7 |
| 35 | 1.4 l | 0.32 l | r=3.9, d=0.9 |
| 40 | 1.2 l | 0.36 l | r=3.2, d=1.0 |
倒车入库轨迹
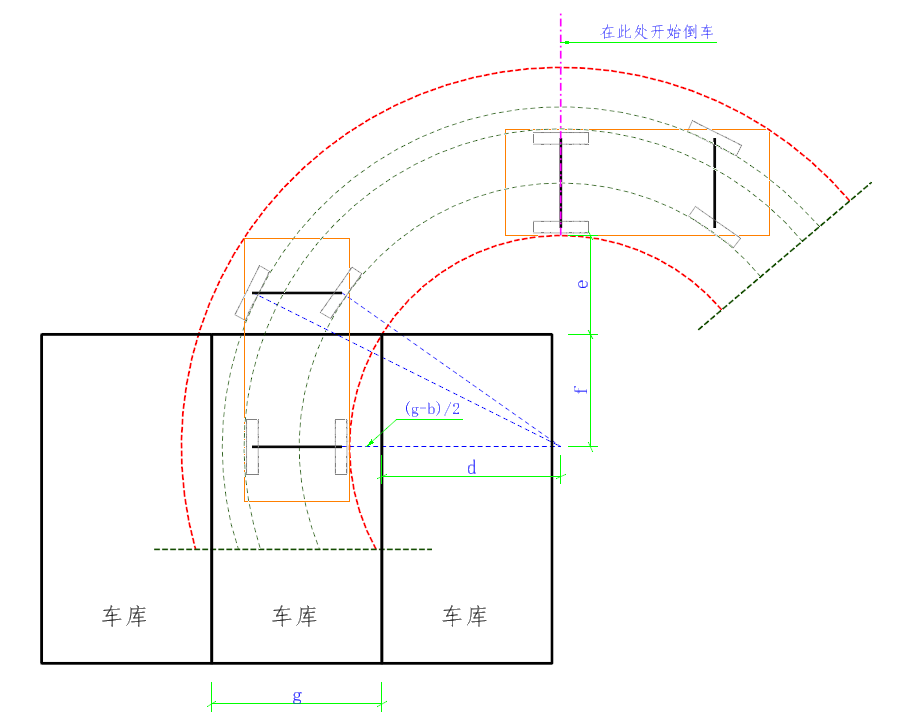
倒车入库如上图所示,参数说明如下:
- d: 倒车时车尾距离目标车库边界的距离
- e: 开始倒车时车侧边距离车库入库线距离
- f: 车库入库线距离圆心的竖向距离
- g: 车库宽度
通过结合汽车转弯半径图示,d、e、f 值如下:
d:
由几何关系得 \[ \begin{aligned} d &= r-(g-b)/2 \end{aligned} \] f:
由勾股定理得 \[ \begin{aligned} r^2 &= d^2+f^2 \\ f &= \sqrt{r^2-d^2} \\ \end{aligned} \] f 按连分数法求解: $$ \[\begin{aligned} 当 \ s &= a^2+b \ (a^2 >= b) \ 时 \\ 有 \ \sqrt{s} &= a+ \frac{b}{a+\sqrt{s}} \\ \therefore f &= r + \frac{-d^2}{r+r+0} (按一层近似计算,f值会偏大)\\ f &= r + \frac{-d^2}{2r} \end{aligned}\]$$
e:
由几何关系得 \[ \begin{aligned} e = r-f \end{aligned} \] 在倒车入库时,一般关心的值是 d 和 e,倒车时一般满打方向盘,所以 \(\theta\) 取最大值(35度)。
按《汽车库设计规范》JGJ100-98第4.1.4条规定:小型汽车与左右两侧墙面的最小距离应为0.6m,与前后墙面的最小距离应为0.5m。(g-b)/2 按取常量 0.6m,从而可以计算得: $$ \[\begin{aligned} d &= 1.4l - 0.6 \\ f &= 0.7l +0.6 - \frac{0.129}{l} \\ \because & \ \frac{0.129}{l} \ 太小,舍去 \\ \therefore f&=0.7l+0.6 \\ e &= r-f = 0.7l-0.6 \end{aligned}\]$$
对于本文所使用的车型,可以得: \[ \begin{aligned} f&=0.7l+0.6 = 0.7*2.712+0.6 = 2.2272 \\ \end{aligned} \] 由于在推导 f 过程中,使用连分数法时只计算到第一层,现在再用 f 值迭代到第二层,于是有: \[ \begin{aligned} f &= r + \frac{-d^2}{r+r+\frac{-d^2}{r+\sqrt{2.2272}}} \\ r &= 1.4l = 3.7968 \\ d &= 1.4l - 0.6 = 3.1968 \\ \\ \therefore f&= 1.991 \\ e &= r-f=1.8018 \end{aligned} \] 结论:
对于轴距为 2.7m 左右的车,其车轮后轴距车库边线距离至少应为 3.1968m,侧边距离入库边线至少为 1.8018m。
当起始位置非图示水平,且车辆位于水平位置左侧时,上述值会相应的减少。
侧方停车轨迹
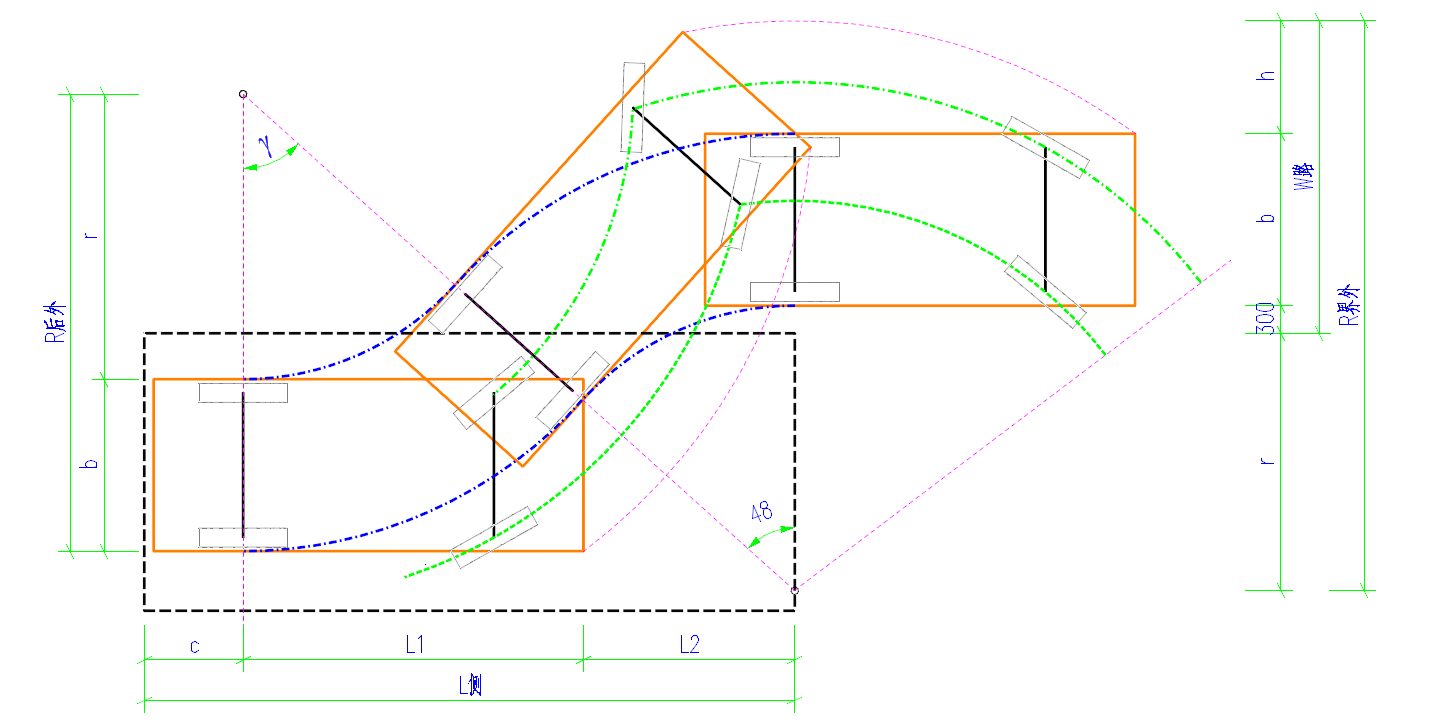
其中,蓝色线代表后轮轨迹,绿色线代表前轮轨迹。
在进行右侧方位停车时,主要有以下步骤:
- 自己的车与右侧库边线保持 30cm 距离
- 在后轴越过目标车库边线时,开始向右满打方向盘
- 待到车身与入库边线程 48度角(建议45~48度)时,反向打满方向盘
- 即可一把倒车入库
入库时车辆左侧道路最小宽度 \(h\)
$$ \[\begin{aligned} R_{界外} &= r + 0.3 + b + h \\ R_{界外}^2 &= (r+0.3+b)^2 + (l+a)^2 \\ \therefore R &= \sqrt{(r+0.3+b)^2 + (l+a)^2} \\ h &= \sqrt{(r+0.3+b)^2 + (l+a)^2} - r -0.3 - b \end{aligned}\]$$
对于不同的车型,可以代入上述公式,计算其左侧距离。
本文中所用车型参数按卡式计算得,\(h=1.22m\)。
一把出库时最小车前距 \(L_2\)
\[ L2 = r \times tan \gamma \]
为什么 \(\gamma\) 建议取 45~48 度呢?
可以通过公式证明,但是比较复杂,笔者就不再这里证明了。
车距判断
在行车过程中,在车内如何判断车头各部位的距离也非常重要。
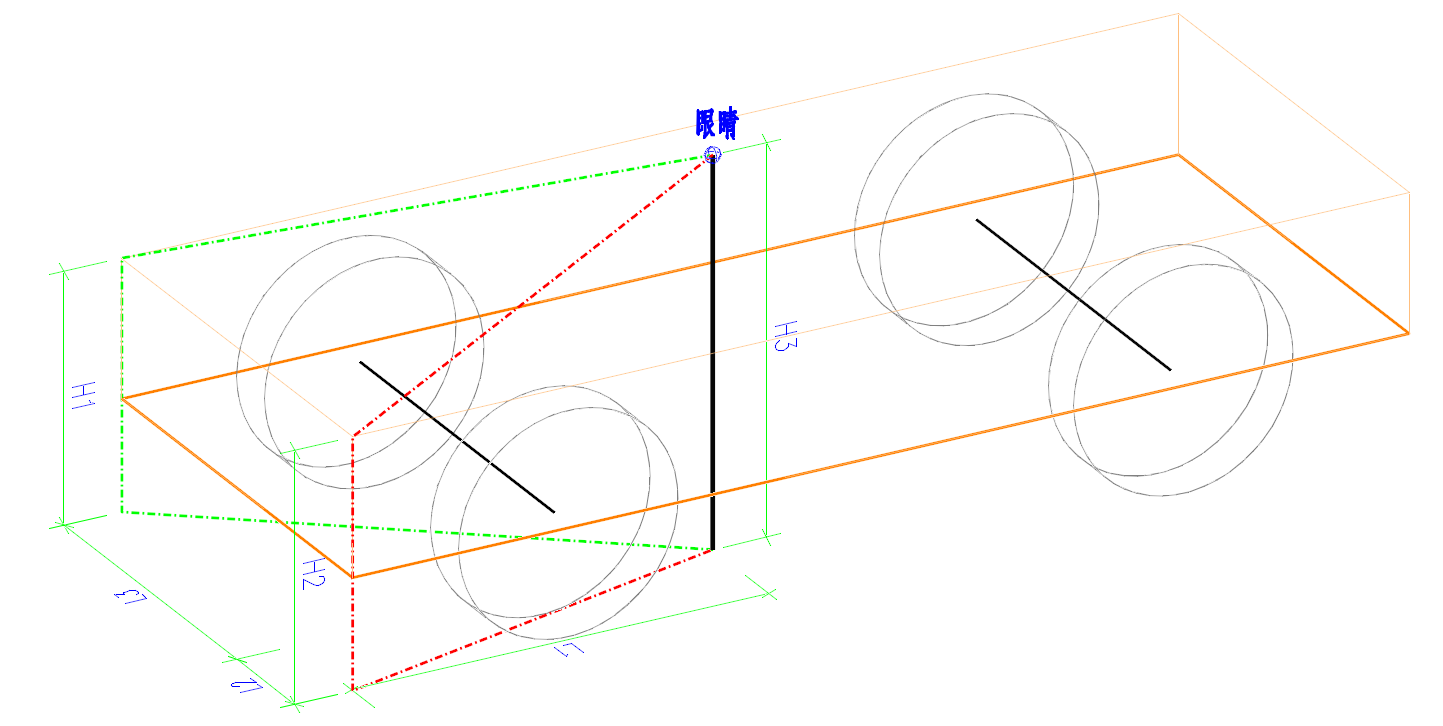
- L1- 驾驶员垂直于车头的距离
- L2 - 驾驶员垂直于车身的左侧距离
- L3- 驾驶员垂直于车身的右侧距离
- H1- 地面距车头右边界高度
- H2- 地面距车头左边界高度
- H3- 驾驶员眼睛距地面高度
由上图可知,视野中,周围的障碍物在视野中必须低于前车的高度,才不会与自己的车剐蹭。在实际中,可以在车内寻找特征点判断车距。
行车安全距离控制
| 车速 | 距离 |
|---|---|
| $v $100km/h | \(D \ge 100m\) |
| \(100km/h \ge v \ge 60 km/h\) | \(D=v\) |
| \(60km/h \ge v \ge 40\) | 50m |
| \(v \lt 40 km/h\) | 30m |
上表中仅为正常行驶状态下的参考值, 在实际行车中,最好按照反应时间来根据自身条件进行估算,其公式如下: \[ T = T_{反应时间} + T_{刹车时间}+T_{制动后与前车安全距离时间等效} \] T 一般取 3 秒。